Ile wynosi dokładność pomiaru suwmiarką przedstawioną na rysunku?
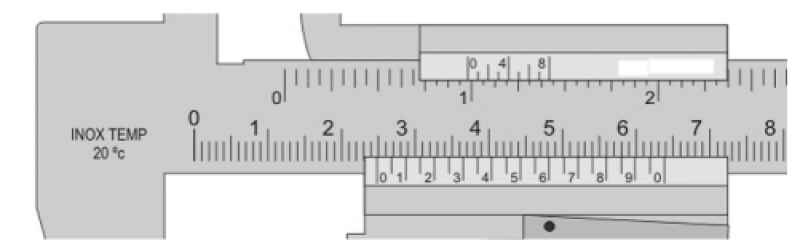
- 0,20 mm
- 0,10 mm
- 0,05 mm
- 0,02 mm
Przyrząd przedstawiony na rysunku przeznaczony jest do pomiaru

- współczynnika mocy.
- współczynnika mocy.
- mocy biernej.
- mocy czynnej.
Z którym wskaźnikiem współpracuje system ADF?
- RMI
- EADI
- ALTM
- EICAS
Na rysunku przedstawiono przyrząd stosowany do pomiaru

- strumienia magnetycznego
- indukcyjności.
- rezystancji.
- impedancji.
Poświadczenie obsługi hangarowej statków powietrznych o MTOM > 5 700 kg może wydać osoba posiadająca przeszkolenie na typ i licencję kategorii
- B.1.1
- B.1.2
- B.2
- C
Statek powietrzny pomimo stwierdzonej usterki może być dopuszczony do lotu na podstawie dokumentu
- AFM
- MEL
- ARC
- CRS
Na rysunku przedstawiono element pokładowego systemu

- DME
- ADF
- ILS
- INS
Rysunek przedstawia przekrój silnika
- krokowego.
- kubkowego.
- bocznikowego.
- synchronicznego.
Wskaźnik przedstawiony na rysunku współpracuje z przetwornikiem

- rezystancyjnym.
- reluktancyjnym.
- piezoelektrycznym.
- termoelektrycznym.
Turn coordinator przedstawiony na rysunku montowany jest w samolocie w taki sposób, aby oś obrotu ramki ruchomej przyrządu, prostopadła do momentu pędu wirnika, była

- równoległa do osi y-y samolotu
- nachylona do osi y-y samolotu.
- prostopadła do osi x-x samolotu.
- nachylona do osi x-x samolotu.
Do pomiaru wartości statycznych naprężeń oraz momentów sił występujących w elementach konstrukcji używane są przetworniki
- tensometryczne.
- reluktancyjne.
- pojemnościowe.
- indukcyjne.
Na rysunku przedstawiono zasadę działania czujnika
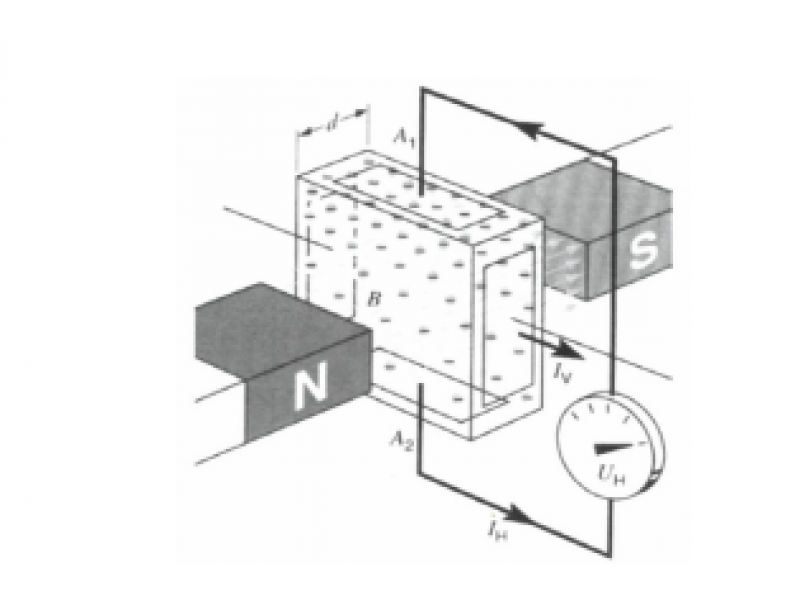
- halotronowego.
- tensometrycznego.
- piezoelektrycznego.
- magnetosprężystego.
Elementami kadłuba samolotu o konstrukcji półskorupowej są
- wręgi i dźwigary.
- podłużnice i pokrycie.
- dźwigary i pokrycie.
- podłużnice i żeberka.
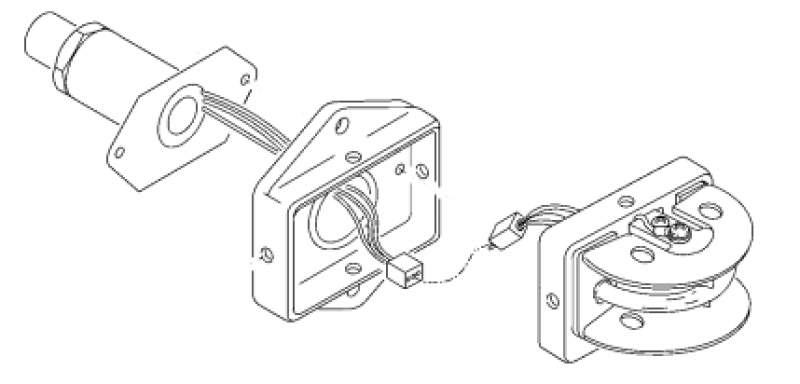
Ile elementów urządzenia jest widocznych na rysunku?
- Pięć.
- Sześć.
- Siedem.
- Osiem.
Mostek przedstawiony na rysunku jest w równowadze, gdy spełniona jest zależność
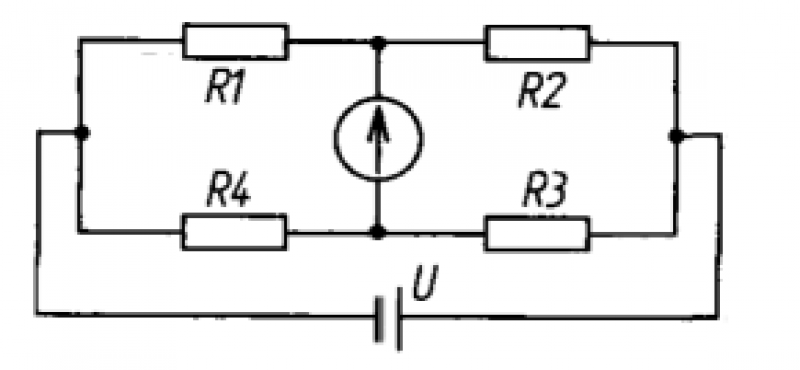
- R1 + R2 = R3 + R4
- R1 + R4 = R2 + R3
- R1 · R4 = R2 · R3
- R1 · R3 = R2 · R4
W układzie przedstawionym na rysunku moc obciążenia źródła przez rezystory jest równa
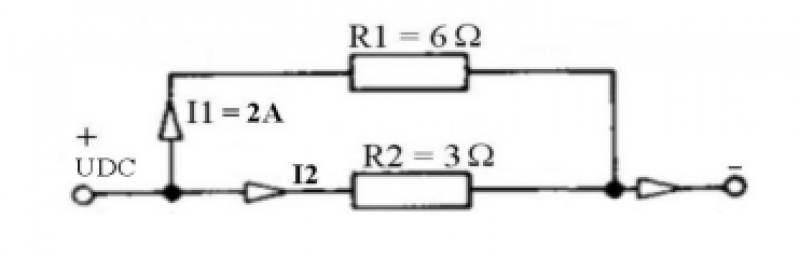
- 12 W
- 24 W
- 48 W
- 72 W
Korektory N-S i E-W umieszczane w busoli magnetycznej służą do usunięcia
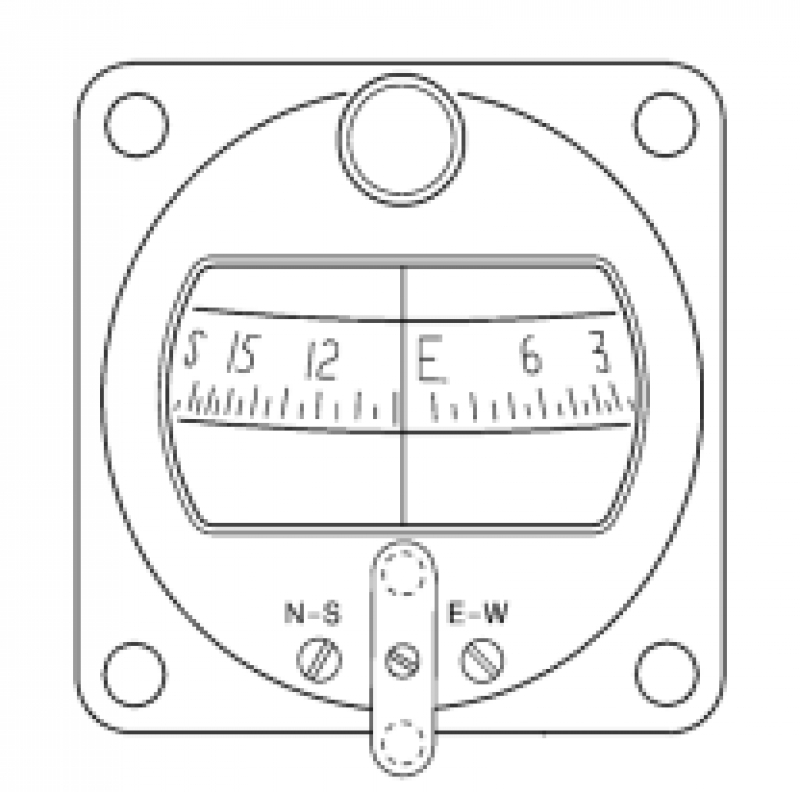
- dewiacji ćwierćokrężnej
- dewiacji półokrężnej.
- dewiacji okrężnej.
- błędów końcowych.
Podstawowym sygnałem wejściowym układu tłumienia wahań samolotu w ruchu przechylania jest wartość składowej
- przyśpieszenia kątowego samolotu wzdłuż osi poprzecznej.
- przyśpieszenia kątowego samolotu wzdłuż osi podłużnej.
- prędkości kątowej samolotu wzdłuż osi poprzecznej.
- prędkości kątowej samolotu wzdłuż osi podłużnej.
Na rysunku przedstawiono odpowiedź skokową członu
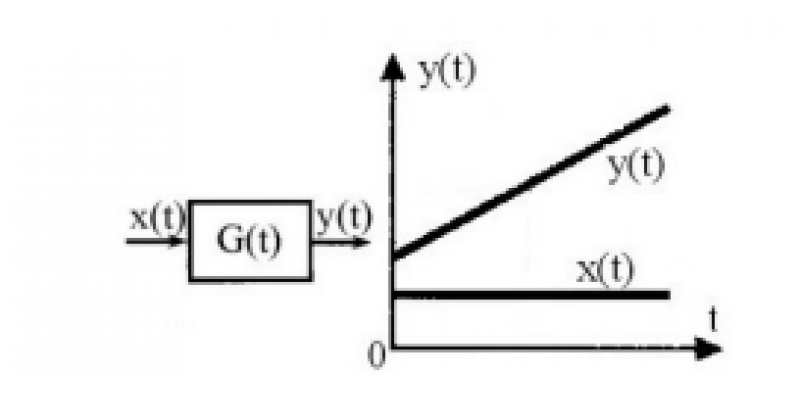
- P
- PI
- PD
- PID
Na rysunku przedstawiono schemat
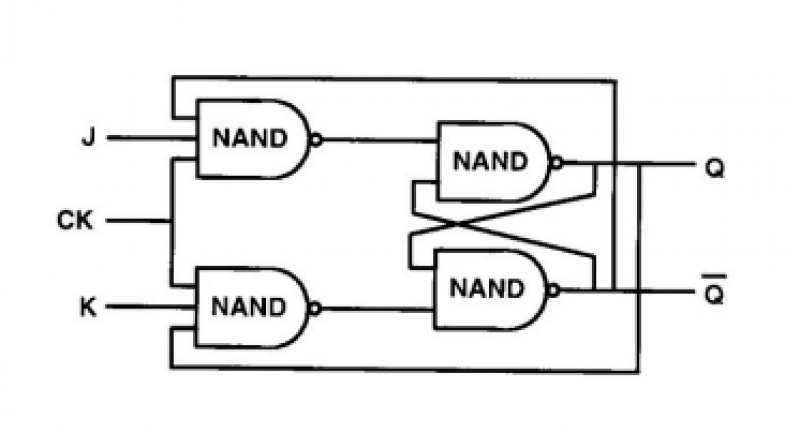
- dekodera.
- sumatora.
- przerzutnika.
- multipleksera.
Rysunek przedstawia przebieg sygnałów wejściowych i sygnału wyjściowego dla bramki logicznej
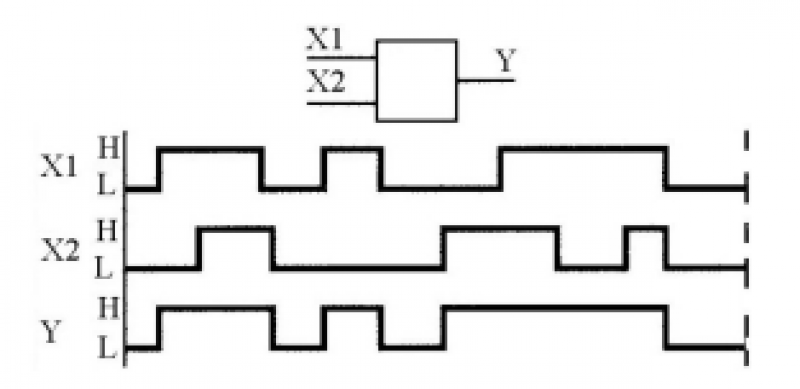
- NOT
- AND
- OR
- NOR
Rysunek przedstawia schemat blokowy systemu
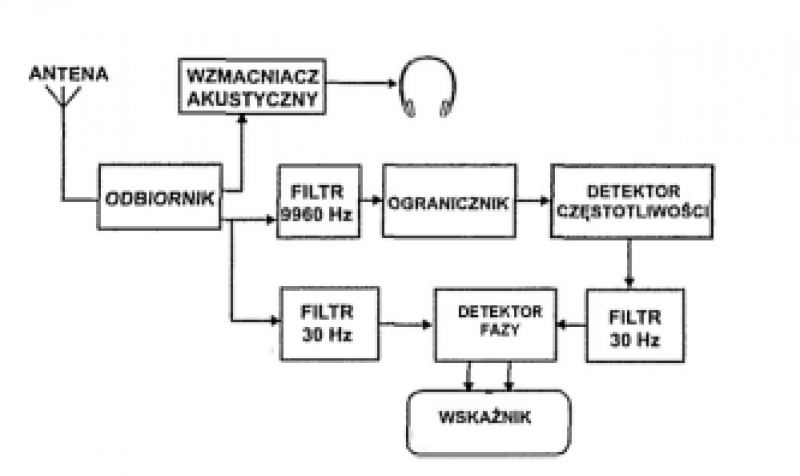
- ILS
- VOR
- ADF
- DME
W przedstawionym na rysunku samolocie antena systemu ILS jest zabudowana w miejscu oznaczonym symbolem
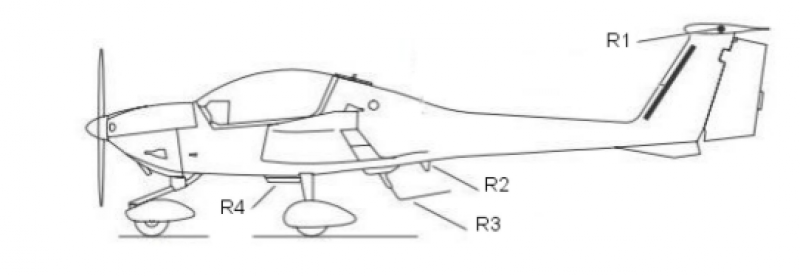
- R1
- R2
- R3
- R4
Na rysunku przedstawiono antenę systemu
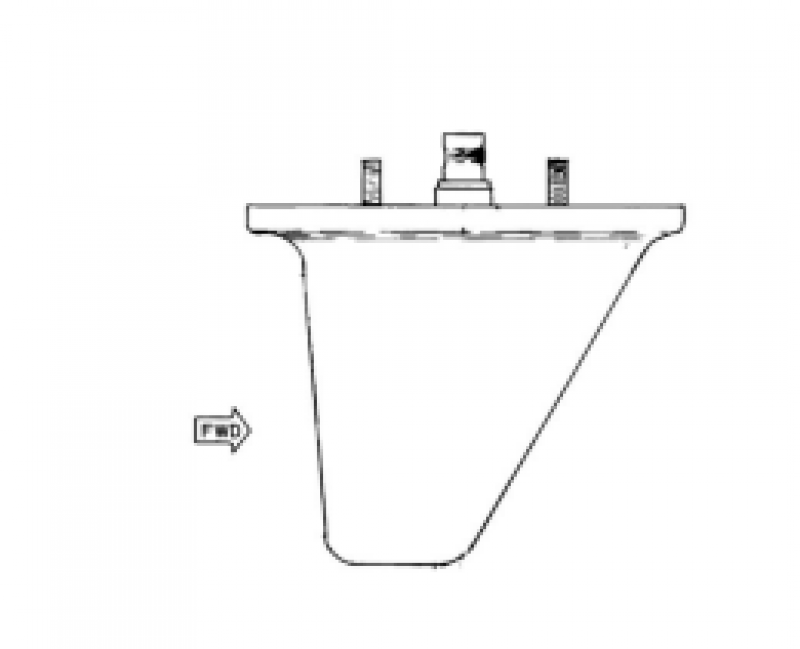
- COMM
- ADF
- DME
- ILS
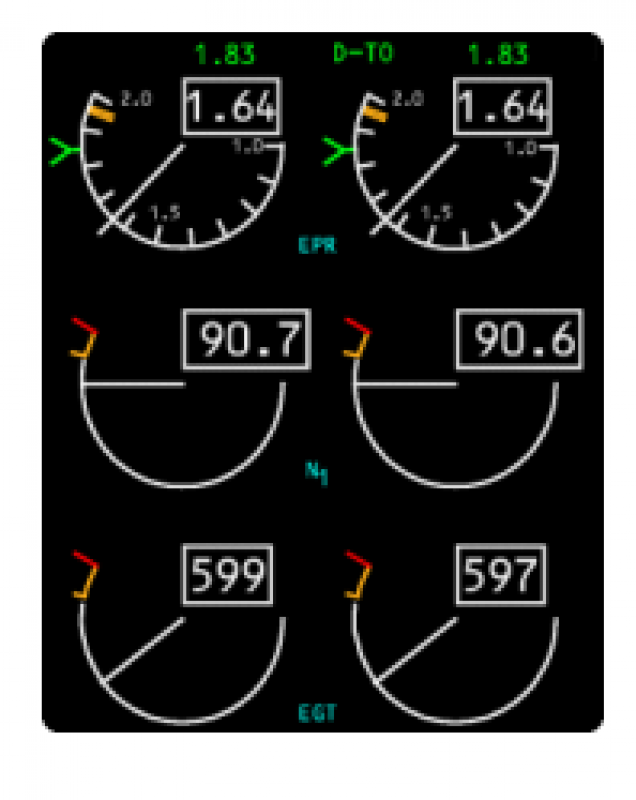
Zgodnie z zamieszczonymi na rysunku wskazaniami PFD samolot

- zniża się.
- wznosi się.
- utrzymuje stałą wysokość.
- leci na małych kątach natarcia.
Przedstawione zobrazowanie wskazań wyświetlane jest na monitorze
- PFD
- MFD
- EHSI
- EICAS
W obwodzie szeregowym RL prądu sinusoidalnego (dla którego ) rezystancja jest równa 69,3 Ω, reaktancja 40 Ω, a moduł impedancji 80 Ω. Ile wynosi kąt przesunięcia fazowego między napięciem i prądem?
- 30°
- 45°
- 60°
- . 90°
Rysunek przedstawia schemat blokowy układu
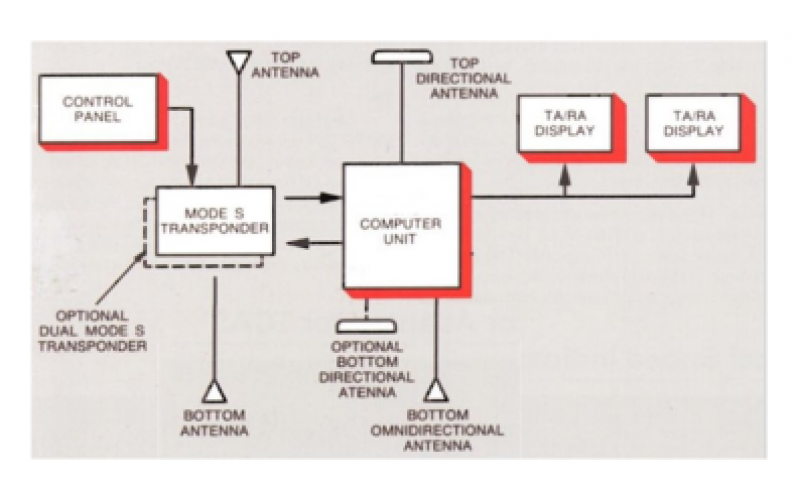
- COMM
- GPWS
- TCAS
- WRX
Rysunek przedstawia instalację zasilania przyrządów giroskopowych. Przyrząd oznaczony na rysunku literą A wskazuje wartość
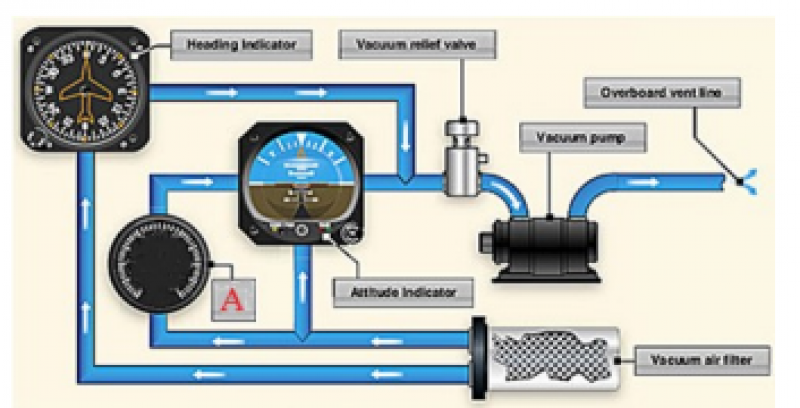
- natężenia przepływu powietrza.
- prędkości przepływu powietrza
- temperatury powietrza.
- ciśnienia powietrza.
Prądnica, której schemat przestawiono na rysunku, generuje napięcie przemienne U = 3·200 V/400 Hz, przy czym . Ile wynosi prędkość obrotowa wirnika prądnicy?
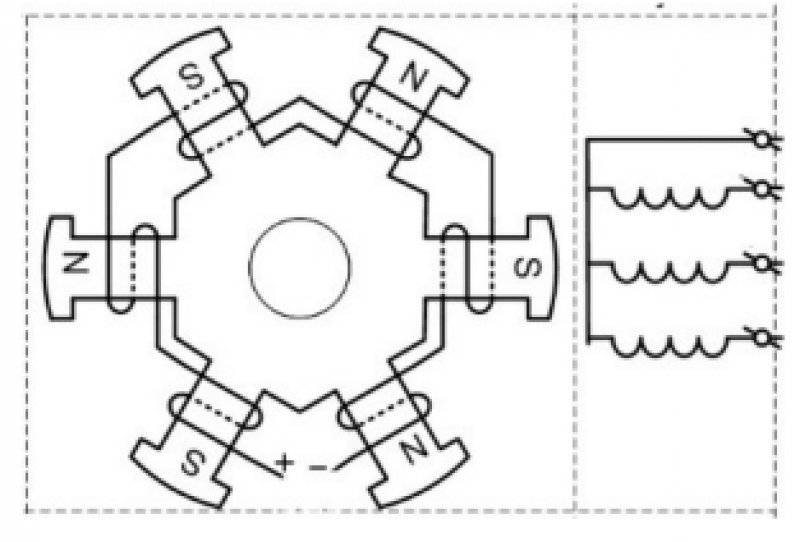
- 6 000 obr./min
- 8 000 obr./min
- 10 000 obr./min
- 12 000 obr./min
Który system określa i przesyła informacje o kursie, położeniu przestrzennym, prędkości i wysokości lotu?
- ATC (AirTraffic Control)
- ADC (Air Data Computer)
- IRS (Inertial Reference System)
- FMS (Flight Management System)
Na rysunku przedstawiającym wskaźnik RMI widoczne maszyny elektryczne to

- magnesyny
- prądnice
- selsyny
- selsyny
Rysunek przedstawia lampę pokładowego światła
- antykolizyjnego.
- nawigacyjnego.
- stroboskopowego.
- kołowania.
Trzy przewody wykonane z jednakowego materiału o równych długościach, o rezystancji oraz przekrojach S1 < S2 < S3 przewodzą prąd o jednakowej gęstości .
Spadki napięć na tych przewodach spełniają zależność
- Odpowiedź A
- Odpowiedź B
- Odpowiedź C
- Odpowiedź D
Na rysunku przedstawiono wskazania przyrządu użytego do pomiaru wartości napięcia. Błąd bezwzględny pomiaru wynosi

- ±0,5 V
- ±0,375 V
- ±0,15 V
- ±0,075 V
Modulację fazową sygnałów stosuje się w systemach
- COMM
- DME
- VOR
- RA
W obwodzie jak na rysunku na skutek zwiększenia włączonej w obwód rezystancji R
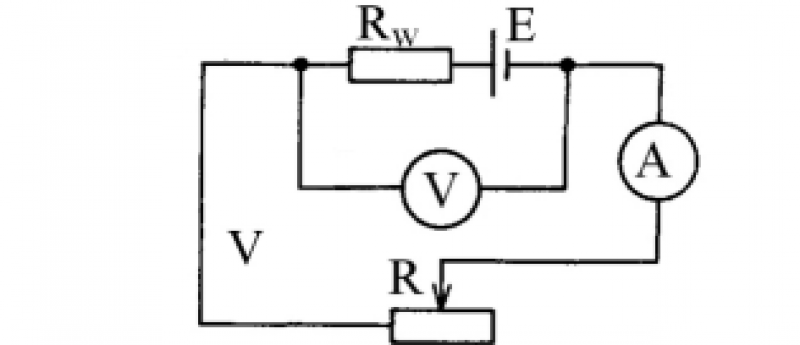
- wskazanie woltomierza się zwiększy, a amperomierza się zmniejszy.
- wskazanie woltomierza się zmniejszy, a amperomierza się zwiększy.
- wskazanie woltomierza się nie zmieni, a amperomierza się zmniejszy
- wskazania woltomierza i amperomierza zwiększą się.
W układach sterowania ujemne sprzężenie zwrotne zapewnia zwiększenie
- wrażliwości układu.
- szybkości działania.
- dokładności działania.
- odporności na zakłócenia.
Na rysunku przedstawiono giroskopowy czujnik prędkości kątowej, na którym zaznaczono wypadkowy moment sił zewnętrznych L działających na giroskop. Moment ten wywołuje precesję wokół
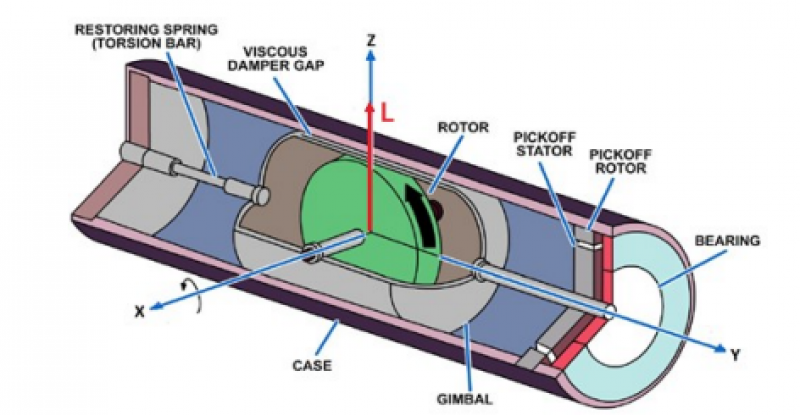
- osi z, a zgodnie z regułą śruby prawoskrętnej zwrot wektora prędkości precesji jest zgodny ze zwrotem tej osi.
- osi z, a zgodnie z regułą śruby prawoskrętnej zwrot wektora prędkości precesji jest przeciwny do zwrotu tej osi.
- osi y, a zgodnie z regułą śruby prawoskrętnej zwrot wektora prędkości precesji jest zgodny ze zwrotem tej osi.
- osi y, a zgodnie z regułą śruby prawoskrętnej zwrot wektora prędkości precesji jest przeciwny do zwrotu tej osi.
Z załączonego fragmentu dokumentacji technicznej samolotu wynika, że najbardziej prawdopodobną przyczyną braku wskazań wysokości na przyrządzie INTEGRATED STANDBY FLIGHT DISPLAY jest niesprawny element
- Right Pitot ADM
- Right Static ADM
- Center Pitot ADM
- Center Static ADM